Tin tức mới nhất



Hướng dẫn chi tiết

Phần mềm cắt thép tốt nhất hiện nay Steel Cutter Unicons
Một kỹ sư mới ra trường khi chỉ huy trưởng giao cho công việc tính toán số lượng cây thép, chủng loại thép ...

Hướng dẫn
hướng dẫn sử dụng máy toàn đạc điện tử Leica TS06 Plus phần 6
Trong đo đạc máy toàn đạc điện tử là một dụng cụ quan trọng. Một người cán bộ đo đạc mà làm chủ ...

Hướng dẫn
Hướng dẫn sử dụng máy toàn đạc Leica TS 06 Plus
Những ngày gần đây có một số bạn kỹ sư nhắn tin hỏi cách chuyển từ bản vẽ thiết kế ra thực địa ...

Hướng dẫn
Hướng dẫn sử dụng máy toàn đạc Leica TS 06 Plus phần 4
Trong đo đạc muốn thực hiện đo vẽ bản đồ, bản vẽ hiện trạng sử dụng dất hoặc định vị công trình hay ...

Hướng dẫn
Hướng dẫn sử dụng Leica TS 06 Plus phần 3
Khảo sát, đo đạc địa hình đây là chương trình đo chi tiết thường được sử dụng phục vụ công tác trắc địa ...

Hướng dẫn sử dụng máy toàn đạc điện tử Leica TS06 Plus-Phần 2
Hôm nay chúng tôi tiếp tục viết tiếp loạt bài hướng dẫn sử dụng máy toàn đạc điện tử Leica TS 06 Plus. ...

Hướng dẫn
Hướng dẫn sử dụng máy toàn đạc điện tử Leica TS 06 Plus
Dịch vụ đo đạc thành lập bản đồ địa hình, bản đồ hiện trạng hay định vị cắm ranh.v.v. thì việc sử dụng ...
Hướng dẫn
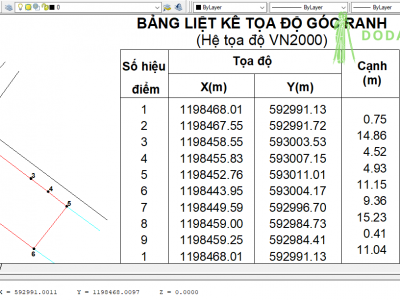
Hệ trục tọa độ trong lĩnh vực đo đạc và hệ trục tọa độ trong Autocad
Thời gian vừa qua có nhiều bạn có nhắn tin hỏi về sự khác nhau giữa hệ trục tọa độ trong đo đạc ...

Hướng dẫn
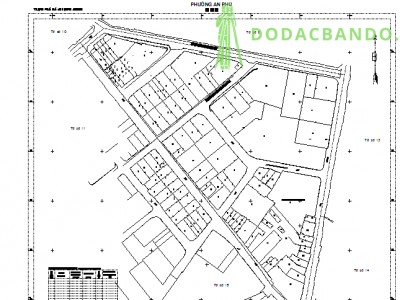
Bản đồ số hóa bản đồ và hệ thống thông tin địa lý GIS
Bản đồ – bản đồ số hoá Bản đồ là hình vẽ thu nhỏ của mặt đất lên giấy theo một quy ...
Hướng dẫn
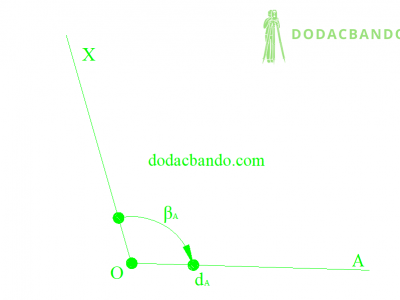
Định hướng đường thẳng và góc định hướng
Khi kỹ sư đo đạc muốn đo một thửa đất hay một một con đường chính xác thì cần phải định hướng đường ...











Nhiều bình luận
HỆ THỐNG ĐỊNH VỊ TOÀN CẦU GPS ỨNG DỤNG CÔNG NGHỆ GPS TRONG CÔNG TÁC TRẮC ĐỊA BẢN ĐỒ
TỔNG HỢP CÁC PHẦN MỀM DÀNH CHO KỸ SƯ XÂY DỰNG CẦU ĐƯỜNG KỸ SƯ ĐO ĐẠC
KỸ THUẬT ĐO ĐẠC PHỤC VỤ CÔNG TÁC THI CÔNG – NHÀ CAO TẦNG
CUNG CẤP DỊCH VỤ TRẮC ĐẠC ĐỊNH VỊ CÔNG TRÌNH
ĐO GPS TƯƠNG ĐỐI VÀ ĐO GPS TUYỆT ĐỐI